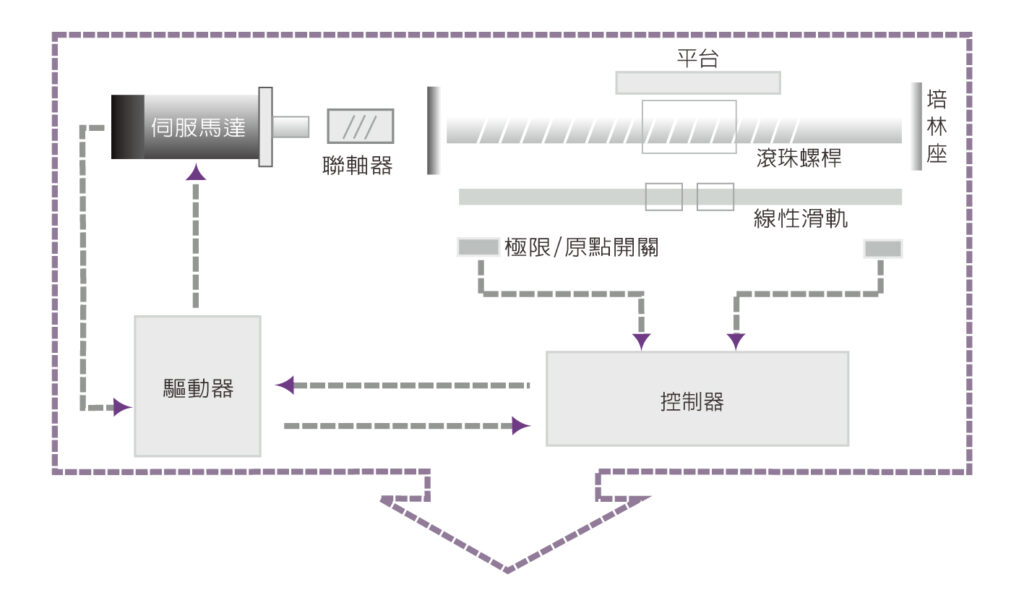
機電定位模組完整結合機械與電器介面,摒棄傳統組立作業,真實帶給客戶整合性的益處,提供使用方便、品質可靠、成本較低的新選擇。
機電定位模組=控制器+驅動器+伺服馬達+聯軸器+螺桿+滑軌+極限開關
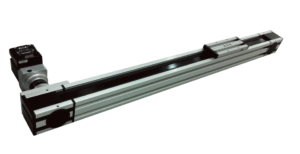
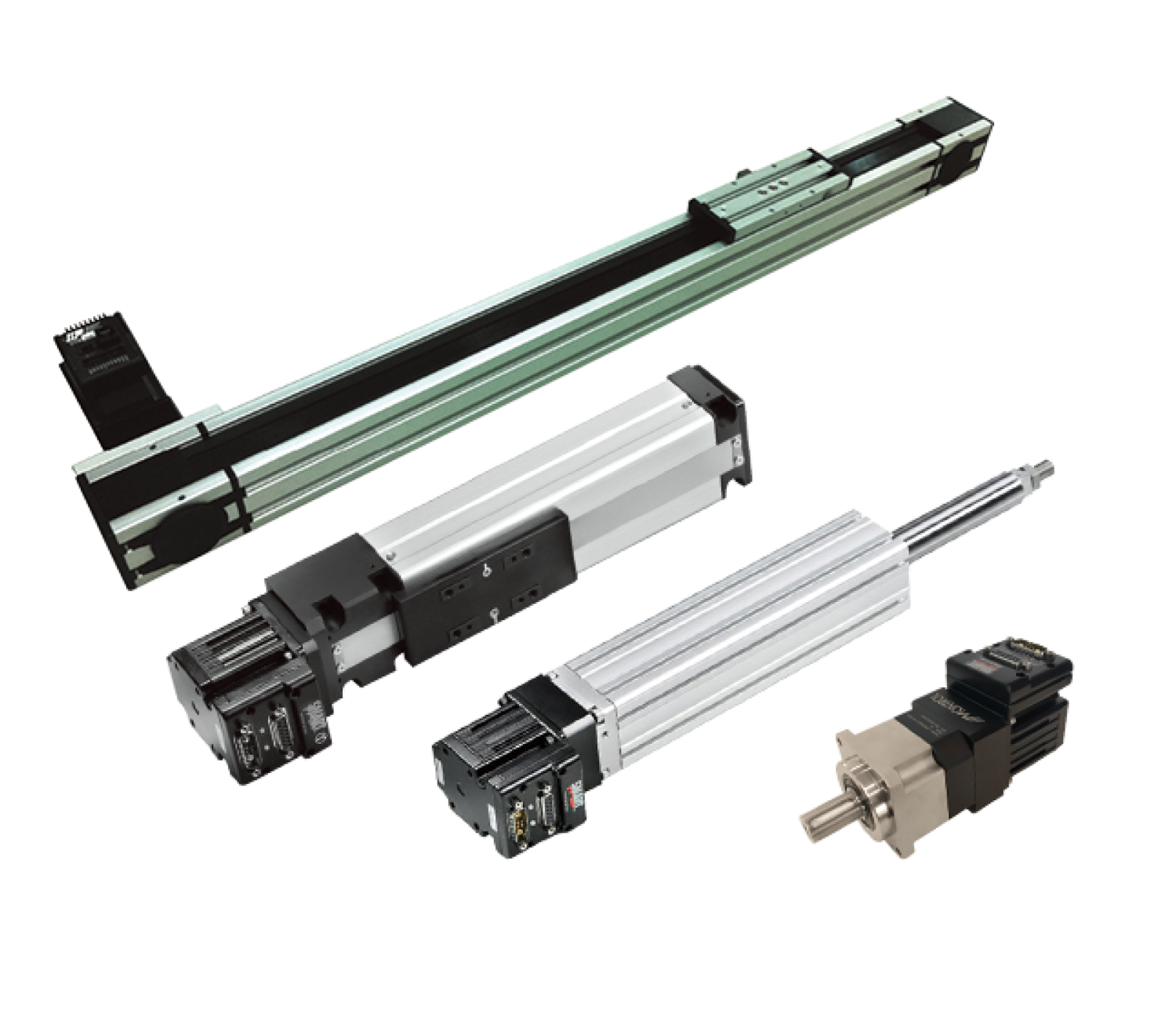
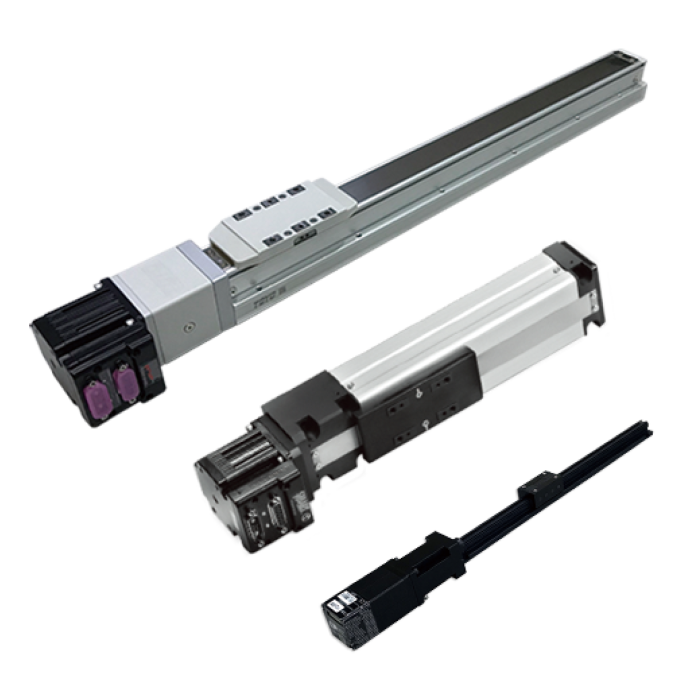
載台型直線致動器,螺桿驅動,相對皮帶式有較高力量及精度。
推桿型直線致動器,螺桿驅動,相對載台型適合垂直、多角度變化之推拉應用。
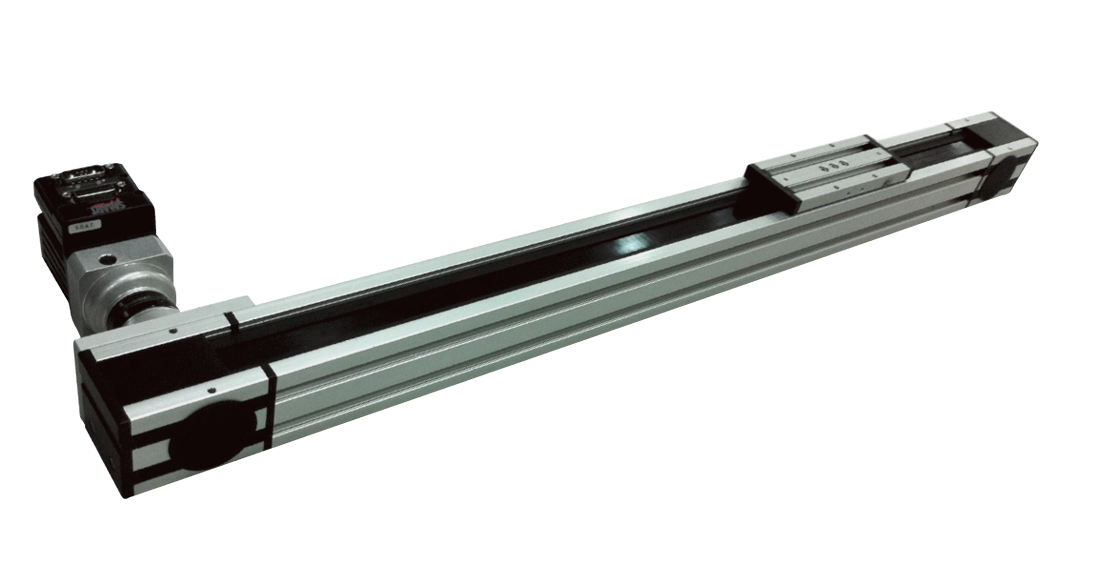
載台型直線致動器,皮帶驅動,相對螺桿式有較高速度及較長作動行程。
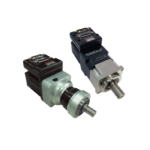
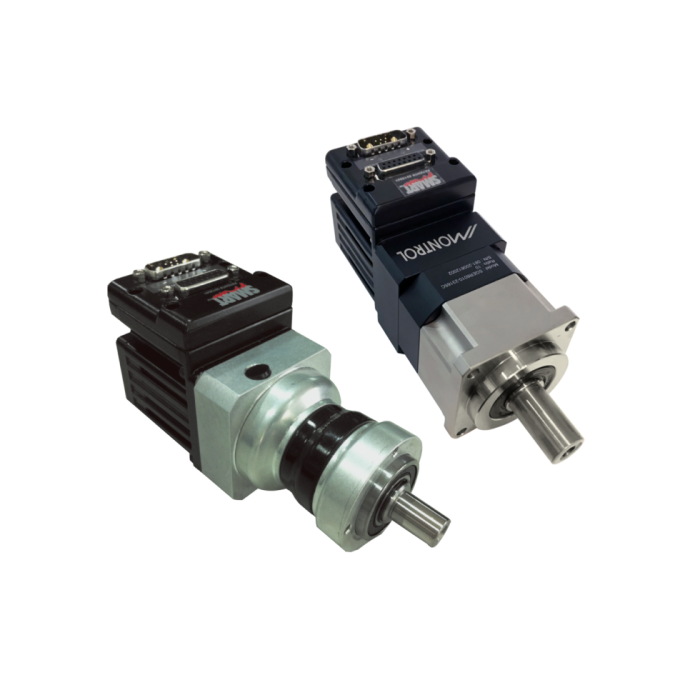
旋轉致動器,行星齒輪驅動,適用各種旋轉及傳動應用。