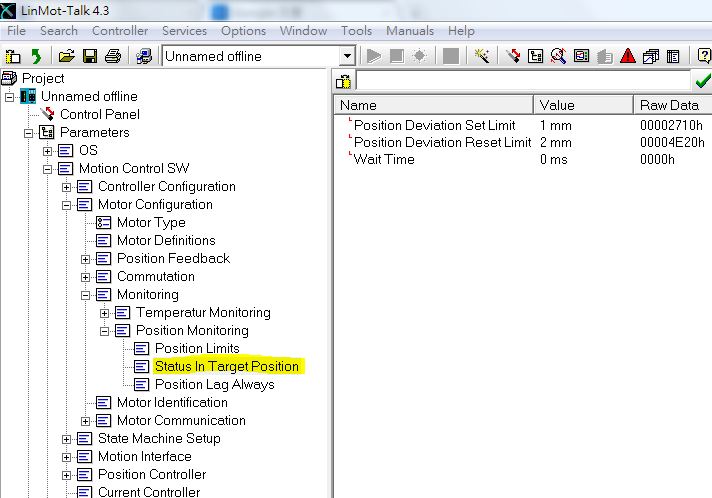
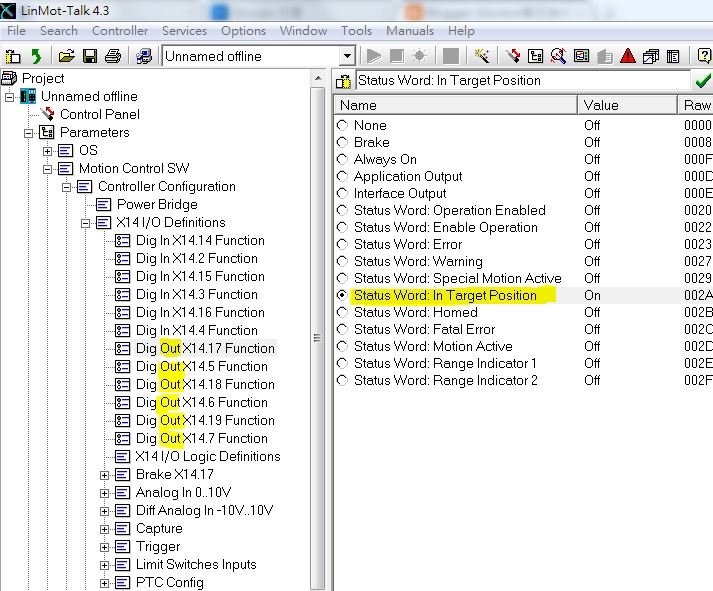
LinMot到達定位後輸出訊號設定LinMot線性馬達 / 作者: ae LinMot可以在到達定位時,輸出一個訊號,且能調整輸出的時機範圍1.在Parameters>Motion Control SW>Motor Configuration>Monitoring>Status In Target Posion可調整:Position Deviation Set Limit(誤差範圍)Position Deviation Reset Limit(重設範圍)及Wait Time(等待時間) 2.然後選擇需要輸出的output腳位