影片動作說明:
當凸輪主軸從啟動開始每次轉10轉時,從動軸完成一次動作週期(程式範例每一周期跑7個設定點位置),後面重複動作。
凸輪主軸 :
EIGN(2) EIGN(3) ZS
O=0 ‘將目前位置設定為原點
WAIT=500 ‘等待500毫秒
VT=32768 ‘速度值
ADT=100 ‘加減速值
MV ‘速度模式
G ‘開始運動
END
==========================
從動軸 :
EIGN(W,0) ZS
O=0 ‘將目前位置設定為原點
CTE(1) ‘清除所有CAM表單紀錄
CTA(7,40000) ‘創建7個點的CAM表,並指定每個點之間的主編碼器距離為40000
CTW(0) ‘加入第一個點; 開始點為點0
CTW(1000) ‘加入第二個點; 從開始到點1000
CTW(3000) ‘加入第三個點; 從開始到點3000
CTW(8000) ‘加入第四個點; 從開始到點8000
CTW(6000) ‘加入第五個點; 從開始到點6000
CTW(1000) ‘加入第六個點; 從開始到點1000
CTW(0) ‘加入第六個點; 回到開始點
‘表單已寫入 EEPROM.
SRC(-1) ‘使用-1(反向)*外部編碼器
MCE(1) ‘使用樣條模式(Spline mode)
MCW(1,0) ‘使用CAM表1, 從點0開始
MFMUL=24 ‘來自外部編碼器的24:1比率
MFDIV=1 ‘來自外部編碼器的24:1比率
MFA(0) MFD(0) ‘無上升/下降斜坡, 即下指令G時CAM 模式立即跳轉到同步比率
MFSLEW(240000,1) ‘以固定距離的比率設置跟隨模式擺動,
‘固定距離設為240000(CAM表有6段距離*每段40000個編碼器計數);
‘第二個參數值定義: 0 用於指定輸入單元(主單位);
‘1 用於指定行駛距離(從屬單元)
MFSDC(100,0) ‘第一個參數若不為-1則重複凸輪表動作,
‘並指定從站以零比率駐留的主站計數值(0~2147483647);
‘若設為-1則跟隨模式不會自動重啟(只做一次動作)。
‘第二個參數值為: 0以相同方向重複齒輪輪廓;
‘1 重複齒輪輪廓反方向;
‘2 用於使用絕對位置目標的改進的移動模式。
MC ‘進入凸輪模式(Cam mode)
G ‘開始運動
END
==========================
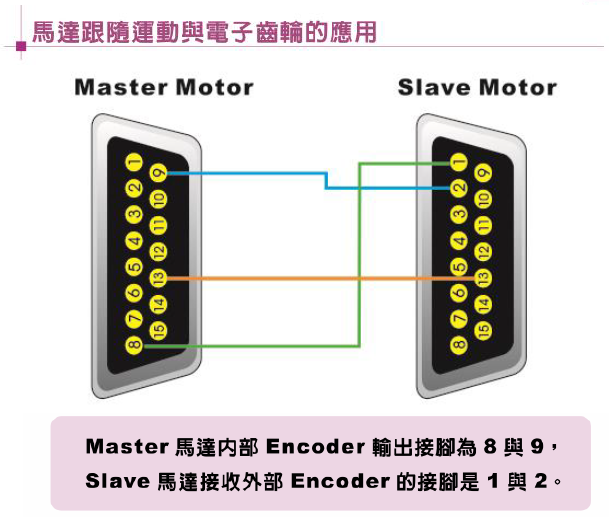
15PIN接線說明 :
凸輪主軸請見Master Motor
從動軸請見Slave Motor