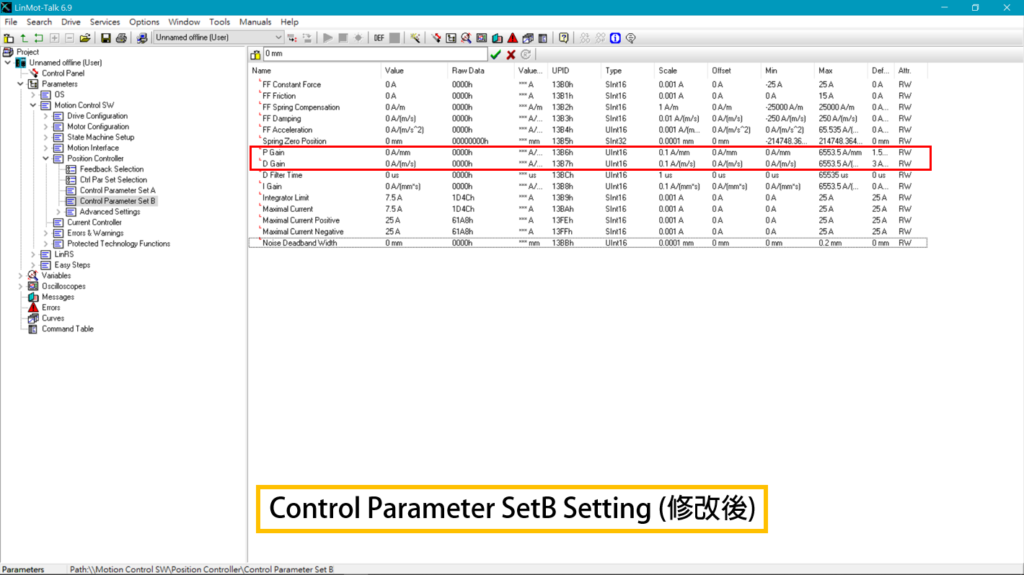
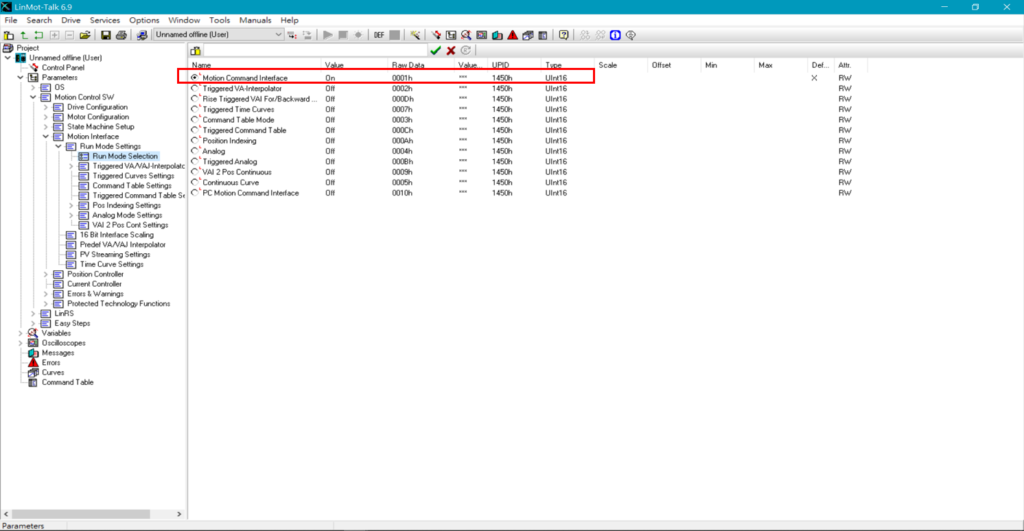
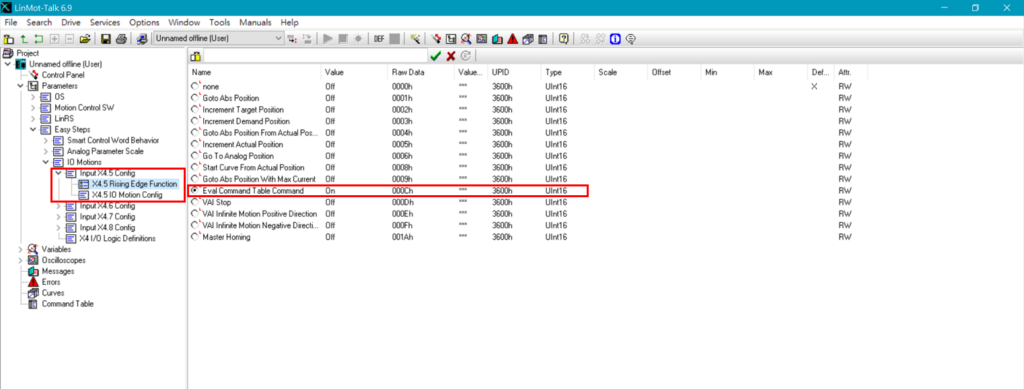
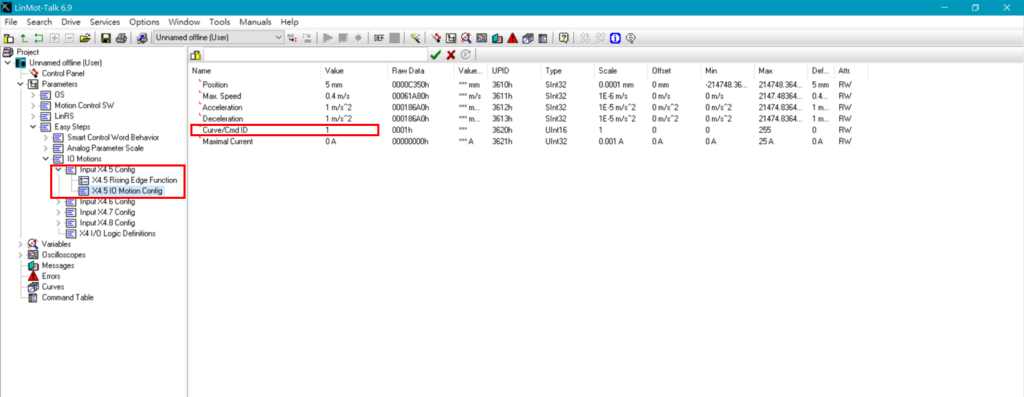
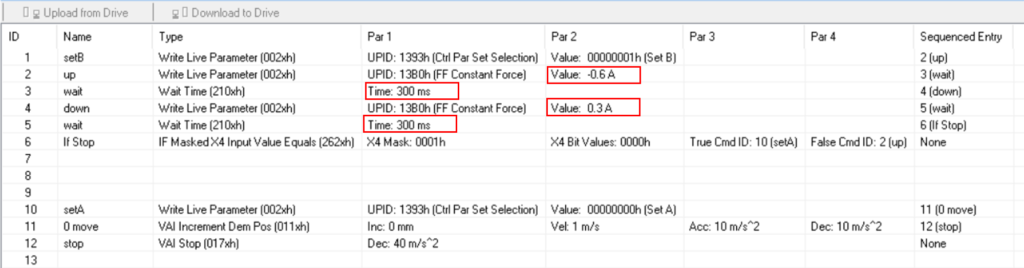
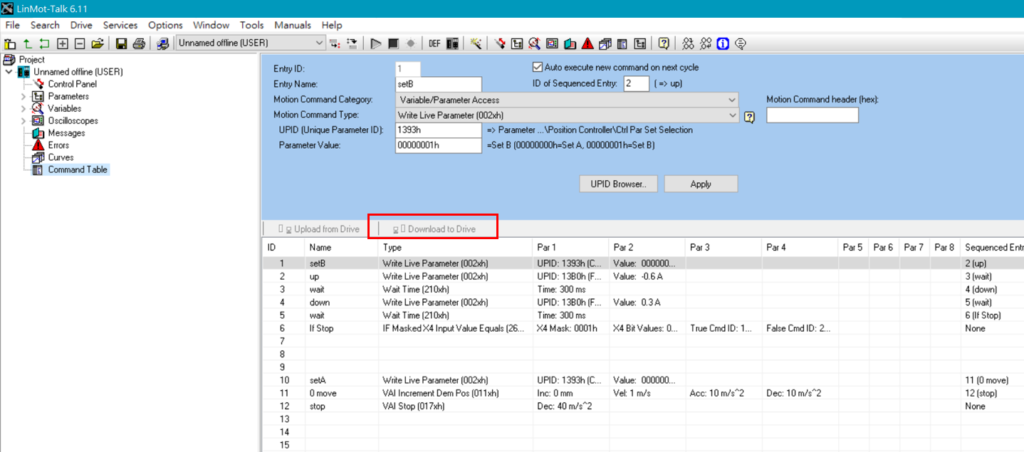
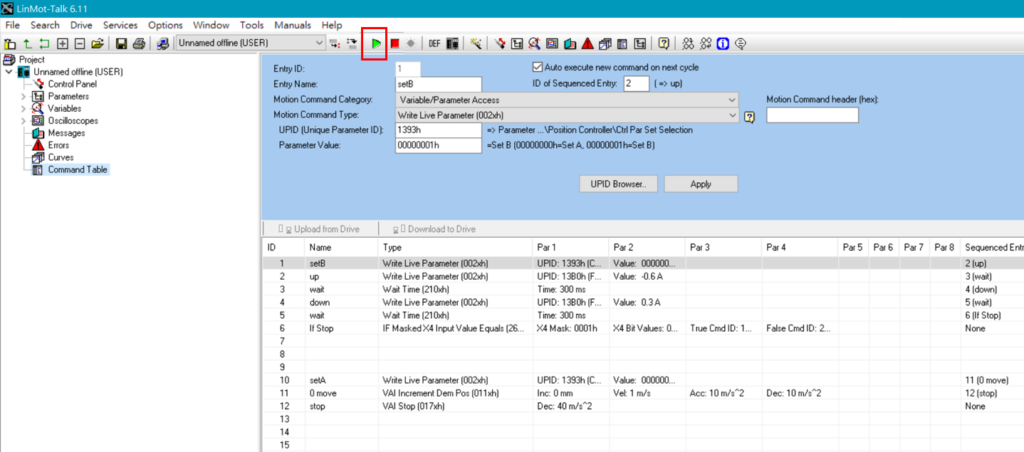
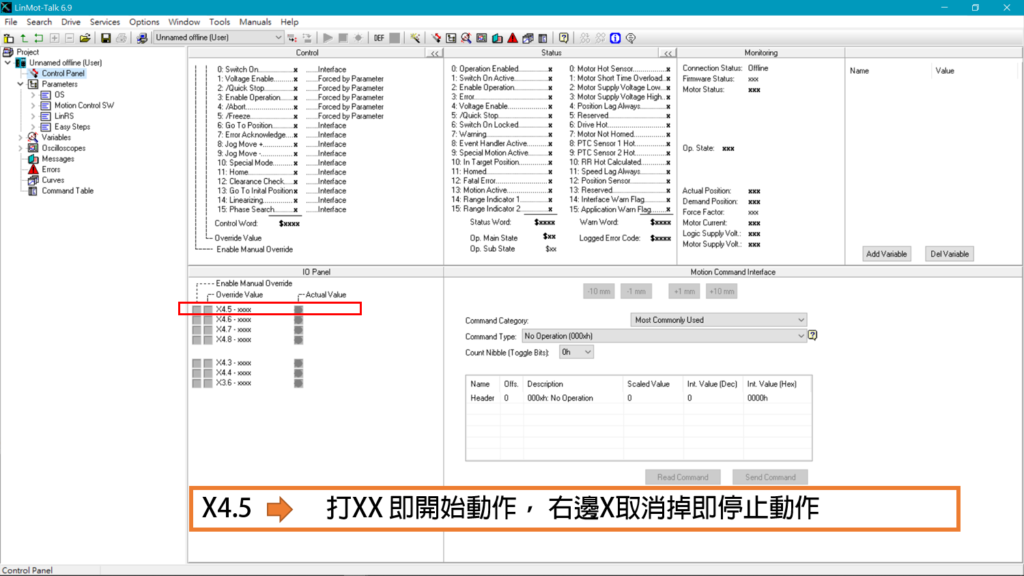
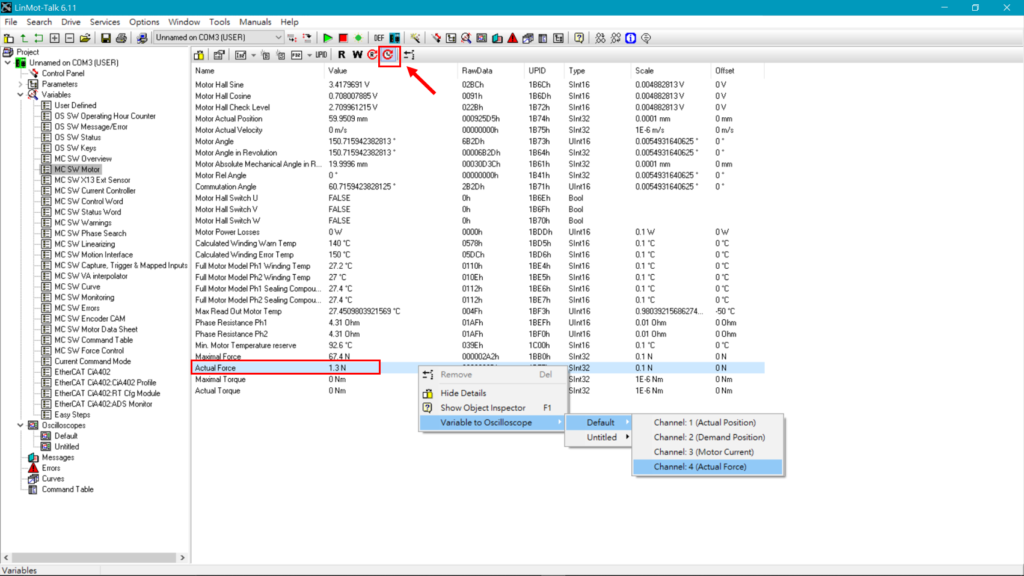
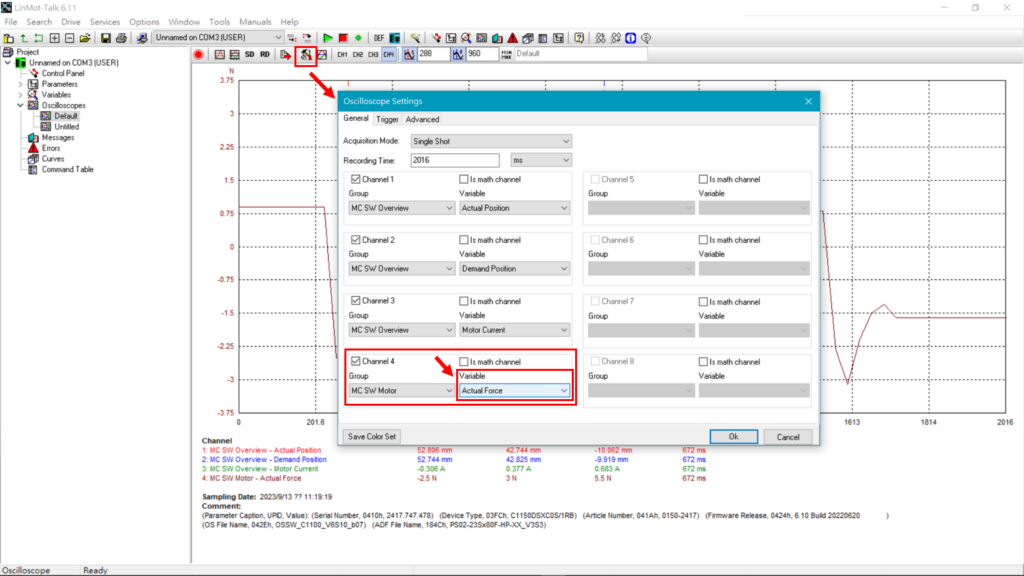
LinMot力量模式 範例程式LinMot線性馬達 / 作者: office 使用Drive型號 : C1100 LinMot如何使用力量控制模式LinMot如何計算馬達出力大小 Step1: 修改SetB參數值 Parameters -> Motion Control SW -> Position Controller -> Control Parameter Set B Step2: Run Mode Selection調整為Motion Command Interface Parameters -> Motion Control SW -> Motion Interface -> Run Mode Settings -> Run Mode Selection Step3-1: 設定Input X4.5為程式啟動/停止開關 Parameters -> Easy Steps -> IO Motions -> Input X4.5 Config-> X4.5 Rising Edge Function -> Eval Command Table Command Step3-2: 從Command Table ID=1開始執行 Parameters -> Easy Steps -> IO Motions -> Input X4.5 Config-> X4.5 IO Motion Config -> Curve/Cmd ID = 1 Step4: 編寫Command Table ID = 2, 4調整線性馬達前進&後退電流; ID = 3, 5調整線性馬達等待時間(時間愈短、頻率愈高) 這裡以垂直運動作為範例,向上運動的電流會大於向下運動的電流電流(A)如何換算成力量(N)請參閱此篇文章說明LinMot如何計算馬達出力大小 Step5: Command Table編輯完後,點擊Download to Drive將程式載入Drive 每次修改程式皆需要重新按Download to Drive按鈕,此時Drive 的firmware會關閉 Step6: 點擊上方綠色箭頭重新啟動firmware 重新啟動firmware後,修改的程式即儲存在Drive中 Step7: Control Panel 操作 Control Panel 底下的 IO Panel 可以用軟體模擬 Input 觸發訊號這邊使用Input 4.5 做為程式啟動/停止開關 補充-用Oscilloscopes監控Actual Force參數值 Step 1: 路徑: Variables -> MC SW Motor -> Actual Force點擊上方讀取參數按鈕,可以即時顯示目前參數值,在Actual Force參數位置點擊右鍵 -> Variable to Oscilloscope -> 選擇Oscilloscopes檔案名稱 -> 選擇加入第幾個Channel (這裡選擇Channel: 4) Step 2: 路徑: Oscilloscope點擊Oscilloscope Settings圖示可以看到Channel 4已自動加入Actual Force 這個參數 Step 3: 路徑: Oscilloscope點擊上方紅色按鈕開始擷取Actual Force 參數值曲線圖